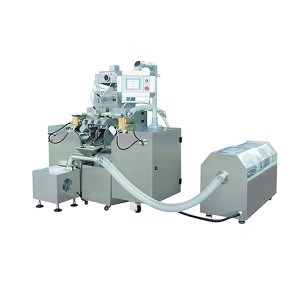
TF-120 አውቶማቲክ ቀጥ ያለ ቱቦ የጡባዊ ጡጦ ማሽን



1.Cap መጋቢ፡- Adopt vibrating plate ኮፍያውን አውቶማቲክ ነቅሎ ለማውጣት እና አቅጣጫውን ለማስተካከል ወደ ካፕ ጣቢያው አውቶማቲካሊ ለመመገብ ይጠቅማል።
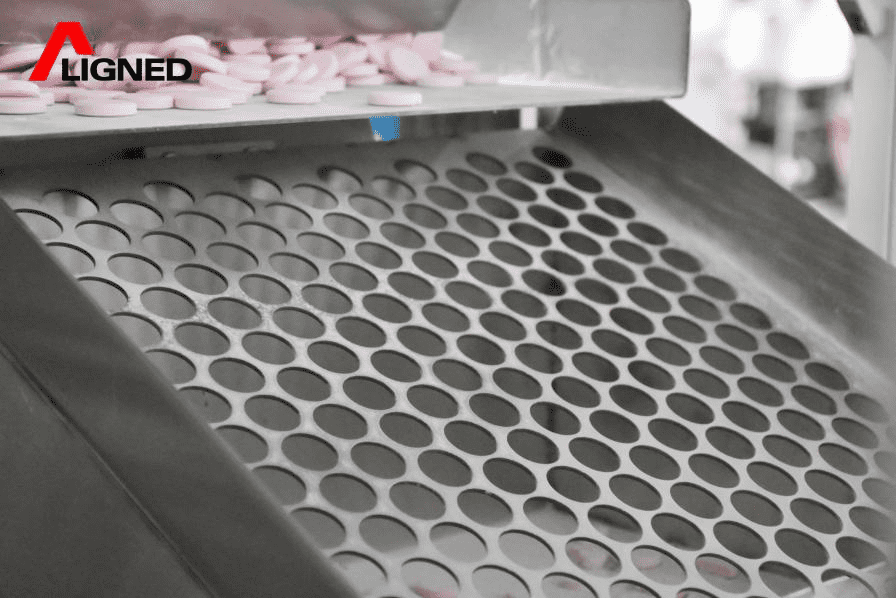
2. ታብሌት መጋቢ፡ ታብሌቶችን አውቶማቲክ ለማድረግ የሚንቀጠቀጥ ሳህን ይቀበሉ እና ወደ ጠርሙስ ማቀፊያ ዘዴ ይመግቡ
3.Bottle መጋቢ: ጠርሙሶቹን በራስ-ሰር መፍታት እና ወደ ጠርሙሱ ዘዴ ይላኩ ።
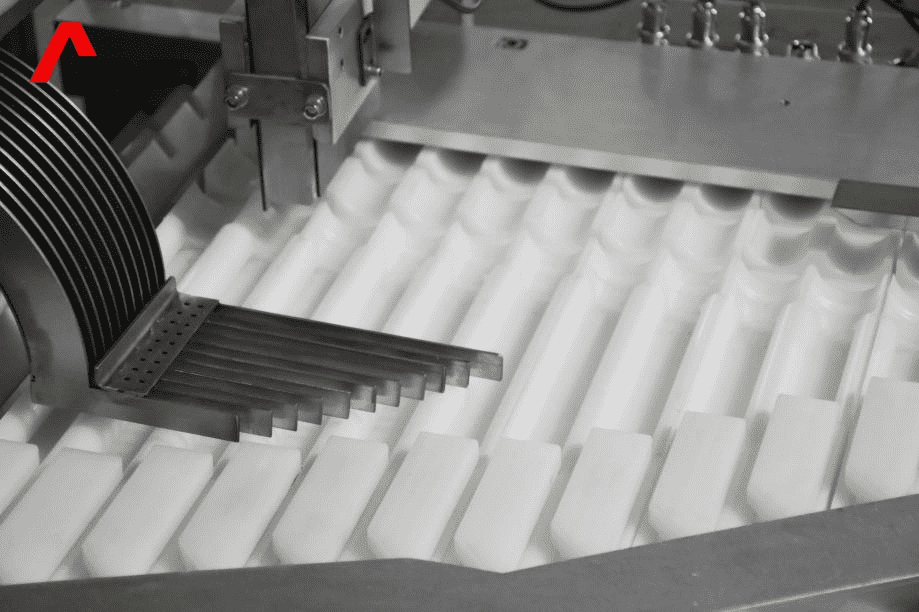
4.Bottling method: አውቶማቲክ ቆጠራ እና ታብሌቶችን ወደ እያንዳንዱ ትራክ አስተካክለው ወደ ጠርሙሱ ይልካቸው
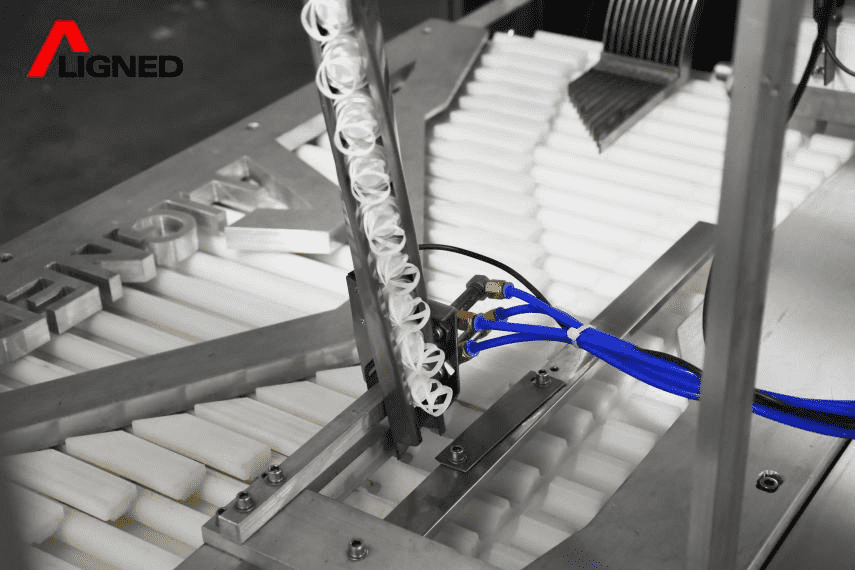
5.Capping method: ጠርሙስ እና ታብሌቶች ሲገኙ, ባርኔጣው አውቶማቲክ በሆነ ጠርሙሱ ውስጥ ይጫናል.
1. ቱቦው ቁራጮች የጎደለው አይደለም መሆኑን ለማረጋገጥ ድርብ ማወቂያ photoelectricity ጉዲፈቻ ነው.
2. አዲሱ የንድፍ መዋቅር የመሳሪያውን አሻራ በእጅጉ ይቀንሳል.
3. የንዝረት መታጠፊያ ዘዴ ፍጥነቱ ከባህላዊው የአመጋገብ ዘዴ ከ 1 ጊዜ በላይ ፈጣን ነው, እና አመጋገቢው ለስላሳ ነው, ትራክን እንዳይዘጋ እና የቁሳቁስ መጥፋትን ይቀንሳል.
4. በተለያዩ የቧንቧ መጠኖች መሰረት, የሚጎትተው ሻጋታ በ 2 ደቂቃዎች ውስጥ የሻጋታ መተካትን ማጠናቀቅ ይችላል, የምርት ውጤታማነትን ያሻሽላል.
5. ድርብ ቁልፍ ማስጀመሪያ ስርዓት፡ ቁሳቁሱን በቦታው ለመጀመር አንድ ቁልፍ፣ አውቶማቲክ ስራ ለመጀመር አንድ ቁልፍ።
6. የእርጥበት መቆጣጠሪያ እና የማንቂያ መሳሪያ ሊታጠቅ ይችላል.
7. አንድ የስርዓት መቆጣጠሪያ ስብስብ ከመለያ ማሽን ጋር ሊገናኝ ይችላል.
8.ውጤቱ እስከ 120 ቱቦዎች / ደቂቃ ድረስ የተረጋጋ ነው, ከባህላዊ መሳሪያዎች ጋር ሲነፃፀር ውጤቱ በ 70% ጨምሯል.
9.የመሳሪያው ሙሉ ስብስብ በተለየ ክፍሎች ውስጥ ሊታሸጉ እና ሊጓጓዙ ይችላሉ, እና መቀርቀሪያዎቹ ሲጣመሩ ይስተካከላሉ, እና አሠራሩ ምቹ ነው.
| ከፍተኛ.ውፅዓት | 120 ቲዩብ / ደቂቃ |
| ከፍተኛ.የጡባዊ አመጋገብ ፍጥነት | 98000pc/ሰ |
| የጡባዊ ዲያሜትር | 16-33 ሚሜ |
| የጡባዊው ዲያሜትር (ቢያንስ-ከፍተኛ)፣ በ ሚሊሜትር | 16-33 |
| የጡባዊ ውፍረት | 3-12 ሚሜ |
| የጡባዊ ጥንካሬ | ≥40N |
| የጠርሙስ ብዛት | 5-20pc |
| የቧንቧ ርዝመት | 60-200 ሚሜ |
| ቱቦ ዲያሜትር | 18-35 ሚሜ |
| ገቢ ኤሌክትሪክ | 380V 50HZ 3P |
| ኃይል | 4.5 ኪ.ባ |
| አጠቃላይ መጠን | 2500 ሚሜ * 1600 ሚሜ * 1700 ሚሜ |
| ክብደት | ወደ 480 ኪ.ግ |